Kokemuksia mobiilirobotin käytöstä sairaalaympäristössä
07.12.2020Mobiiliroboteista on hyötyä logistiikan ja tuotannon tehostamisessa. Ihmisiä työllistävät kuormittavat ja epäergonomiset tehtävät voidaan siirtää robotin tehtäväksi ja sitä kautta kehittää tuotantoa sekä prosesseja. Samalla toimintaa voidaan tehostaa lisäämällä älykkyyttä olemassa oleviin materiaalinhallintajärjestelmiin.
Kaakkois-Suomen ammattikorkeakoulun ja Laurea-ammattikorkeakoulun yhteishanke Pienjätelogistiikka sairaalaympäristössä implementoi autonomisen mobiilirobotin osaksi sairaalan jätekuljetuksia Kymenlaakson keskussairaalassa.
Tähänastisia kokemuksia:
• Vahvistus aikaisemmalle käsitykselle, että moderni mobiilirobotti pärjää tehtävässään myös sairaalaympäristössä
• Yllättänyt, kuinka nopeasti robotin käyttöönotto sujui
• Vakuuttanut, että mobiilirobottien käyttö on turvallista myös ihmisten ympärillä
• Huolta herätti se, että korkeakouluopiskelijoille ja työelämässä oleville ei ole tarjolla mobiilirobottiikkaa käsitteleviä hands on -kursseja tai täydennyskoulutuksia, erityisesti korona-aikana, jolloin robotin käyttö voisi pelastaa jopa ihmishenkiä.
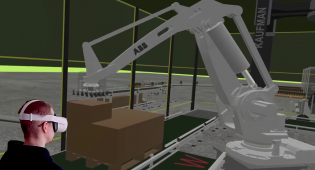
Mikä on mobiilirobotti?
Mobiilirobotti on pyörillä, telaketjuilla tai jaloilla varustettu robotti, joka kykenee liikkumaan autonomisesti ympäristössään. Ominaisuuksien puolesta löytyy hyvin erilaisia mobiilirobotteja pienistä kämmenenkokoisista roboteista autonrunkoa kuljettaviin työjuhtiin.
Mobiilirobottilaivueet toimivat monissa moderneissa varastoissa synkronoidusti, mutta niitä ei vielä kohtaa Suomessa tuotantokäytössä varasto- tai teollisuusympäristön ulkopuolella ns. julkisissa tiloissa.
Miksi mobiilirobotteihin ei törmää useammin? Syynä voi olla se, että mobiilirobotteja ei edes tiedosteta mahdollisena ratkaisuna ongelmaan edellä mainittujen alojen ulkopuolella. Tämän vuoksi onkin erityisen tärkeää, että suomalaisissa korkeakouluissa järjestetään koulutusta robotiikan mahdollisuuksista laajasti. Kokemukset robotin käytöstä opiskeluaikana antavat vastavalmistuneelle uuden työkalun, jolla lähteä ratkomaan työelämän haasteita.
Sairaala ja kliinisen kemian käyttötapaus
Mobiilirobotille sopivia käyttötapauksia haettiin yhdessä sairaalan henkilökunnan kanssa. Pienjätteen kuljetus kliinisen kemian osastolta jätehuoneeseen nousi esiin sairaalaa kiinnostavana kokeilualueena. Pienjätteeksi luokitellaan kaikki kotitalouksissakin lajiteltavat jakeet paristoista lasiin, jonka lisäksi sairaalassa syntyvä riskijäte (pistäväviiltävä), biologinen tai sähkölaitejäte kuuluvat kuljetettaviin jätteisiin.
Ennen varsinaiseen pilottiin siirtymistä suunniteltiin sopiva kuljetusyksikkö ja otettiin huomioon riskitekijöitä eri jätetyypille. Koska jätteiden seassa voi esimerkiksi olla näytteitä, tulee ne kuljettaa tietosuoja huomioon ottaen. Toisaalta pitää varmistaa, että kuorma pysyy tukevasti kyydissä.
Osastolla, aulatiloissa, hississä ja sairaalan vilkkaasti liikennöidyssä tunnelikerroksessa on useita reitin varrella huomioonotettavia kohtia. Nämä tulee ottaa huomioon robottia ohjelmoitaessa ja pohtia erikseen skenaariot, joita robotti matkan varrella voi kohdata, esimerkiksi toiminta häiriötilanteessa, nopeusalueet, kaistat, ensisijaiset reitit ja lähestymiset eri pisteisiin.
Yksi tärkeimmistä toiminnoista erityisesti julkisessa ympäristössä on informatiivinen vuorovaikutus robotin tulee kyetä kertomaan, minne on menossa, miksi on jumissa ja mitä se on seuraavaksi tekemässä.
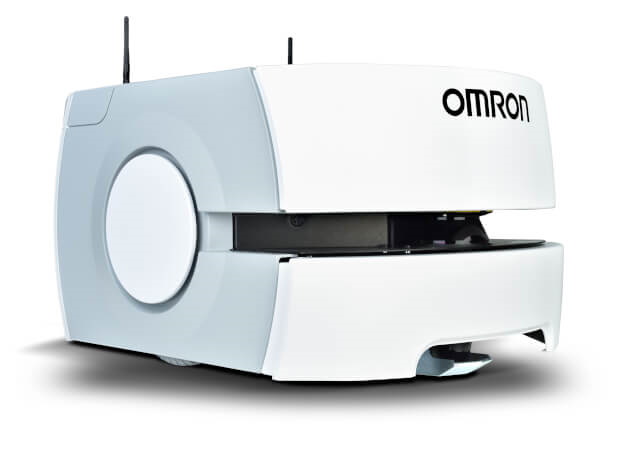
Omron LD:n käyttöönotto
Hankkeella on käytössä älykkäästi navigoiva Omron LD-60 -mobiilirobotti sekä Dimalog Oy:n valmistamat moottoroitu sekä painovoimaisesti toimivat rullakuljettimet. LD ei vaadi magneettinauhoja, kiskoja, majakoita tai muuta infraa, koska navigointi perustuu aktiiviseen laserskannaukseen. Laite liikkuu ja suunnittelee reittinsä itsenäisesti.

Kokeiluissa robotin käyttöönotto aloitetaan kuvaamalla robotin laserskannerin avulla alue, jolla robottia on tarkoitus käyttää. Lopulta alue näkyy Omron MobilePlanner -ohjelmistossa kuin mikä tahansa pohjakartta. Reittejä, tehtäviä, rajoituksia ja toimintoja hallitaan käyttöliittymän kautta, ja ne näkyvät muutoksina pohjakartalla.
Kun robotti on liikkeessä, nähdään reaaliajassa robotin liikkuminen kartalla ja loki sen toiminnasta. Ohjelmaa voi muokata ja hioa loputtomasti, luomalla tehtäviä, makroja ja käyttämällä reitin rakennustyökaluja. Nopeasti huomataan, että yhden reitin kokonaisvaltainen ohjelmointi onkin yllättävän kompleksista, vaikka robotti käyttöönotto olikin nopeaa.
Robotin soveltuvuus sairaalaympäristöön
Sairaalaympäristö on robotin näkökulmasta hyvin dynaaminen ympäristö. Ympäristö muuttuu jatkuvasti: pyörätuoleja, sairaalasänkyjä, paljon nopeasti ja hitaasti liikkuvia ihmisiä.
Julkisessa, jatkuvasti muuttuvassa ympäristössä nousee esille useita robotin toimintaan huomioitavia piirteitä, joista jokainen ohjelmoidaan robotille erikseen. Sairaalaympäristön epäsäännöllisyys olisi luultavasti ollut ylitsepääsemätön haaste 15 vuotta sitten. Tänä päivänä se ei kuitenkaan muodostu esteeksi modernille mobiilirobotille.
Dynaaminen reitinsuunnittelu mahdollistaa uuden reitin muodostamisen kohteeseen lennosta ja robotin käsitys omasta sijainnistaan suhteessa ympäristöön (lokalisointi) sallii ympäristön muuttuvan enintään 80 prosenttia, mikä riittää hyvin sairaalaympäristössä toimimiseen. Hankkeessa jatketaan edelleen robottipilottien parissa.
Pienjätelogistiikka sairaalaympäristössä -hanketta rahoittaa Euroopan aluekehitysrahasto EAKR.